Trying to hear a whisper at a heavy metal concert.
Every engine, metal hull, and battery generates a massive cloud of electromagnetic noise. When you try to navigate using the Earth's natural magnetic field, that faint, perfect signal is completely drowned out by the roar of your own hardware. The map becomes scrambled.
Right now, the world's most advanced systems are trying to navigate while completely blinded by their own noise.
Right now, the world's most advanced systems are trying to navigate while completely blinded by their own noise.
We don’t just read the map. We filter out the noise.
To navigate in the dark, you don't need a stronger signal. You need a better filter.
General Orbit solves the noise problem with a two-part hardware and software system:
General Orbit solves the noise problem with a two-part hardware and software system:
The Ears
The Brain
Chaos in.
They take in the roaring electromagnetic chaos of your vehicle’s engines, batteries, and metal hull, mixed with the faint magnetic signature of the Earth.
certainty out.
Then, our real-time machine learning engine (The Brain) goes to work. It actively maps your vehicle's unique electromagnetic noise and instantly subtracts it from the feed.
What’s left is pure navigation: a crystal-clear, un-jammable map of the Earth’s absolute magnetic baseline.

Revealingthe invisible map.
The Earth’s crust is covered in unique magnetic "anomalies." To standard sensors blinded by noise, these anomalies just look like static.
But to a General Orbit system, they are permanent, un-jammable fingerprints.
By filtering out the chaos, we transform that useless static into a high-definition, topographic map. Suddenly, your vehicle doesn't need to look up at a satellite to know exactly where it is. It just looks down.
No blind spots. No jamming. Just absolute certainty.
But to a General Orbit system, they are permanent, un-jammable fingerprints.
By filtering out the chaos, we transform that useless static into a high-definition, topographic map. Suddenly, your vehicle doesn't need to look up at a satellite to know exactly where it is. It just looks down.
No blind spots. No jamming. Just absolute certainty.
Ending the era of the boom.
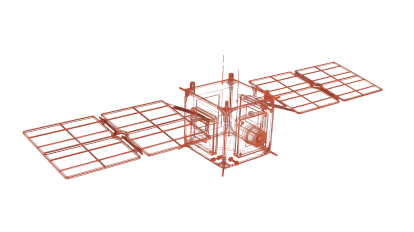
For decades, spacecraft have used long, fragile mechanical "booms" to physically push their sensors far away from the vehicle's internal electromagnetic noise.
Booms add massive weight, increase manufacturing costs, and introduce catastrophic single points of failure. If a boom fails to deploy in orbit, the mission is dead.
By filtering the noise natively, General Orbit eliminates the need for physical distance. We mount our sub-nanotesla sensors directly onto the spacecraft chassis.
No booms. No mechanical hinges. Just a lighter, smarter, risk-free system.
Booms add massive weight, increase manufacturing costs, and introduce catastrophic single points of failure. If a boom fails to deploy in orbit, the mission is dead.
By filtering the noise natively, General Orbit eliminates the need for physical distance. We mount our sub-nanotesla sensors directly onto the spacecraft chassis.
No booms. No mechanical hinges. Just a lighter, smarter, risk-free system.
(01)
The Sky
Immune to electronic warfare, aggressive GPS jamming, and dynamic flight noise.
(02)
The Surface
Absolute lane-level certainty in dense urban canyons, dead-zones, and underground tunnels.
(03)
The Sea
Instantly isolates and subtracts the massive, localized interference of steel hulls and shifting cargo.
(04)
The Deep
Using the Earth's crust as the ultimate map, navigating the abyss without ever surfacing for a signal.
Built for orbit.
Scaled for everywhere.